The prototype wave reducer uses a cycloid pattern CNC-machined into thin fittings brass. Stainless steel cylindrical rolling elements provide linear contact (rather than point contact as with ball bearings), improving longevity by spreading load across the wave surface. Rolling elements were hand-sorted from a batch of ~1,000 to hold ±0.02 mm tolerance, resulting in very low play. The reducer achieves approximately 93% efficiency at a 10:1 reduction favorable against harmonic and strain wave drives, which typically sit in the 70–85% range.
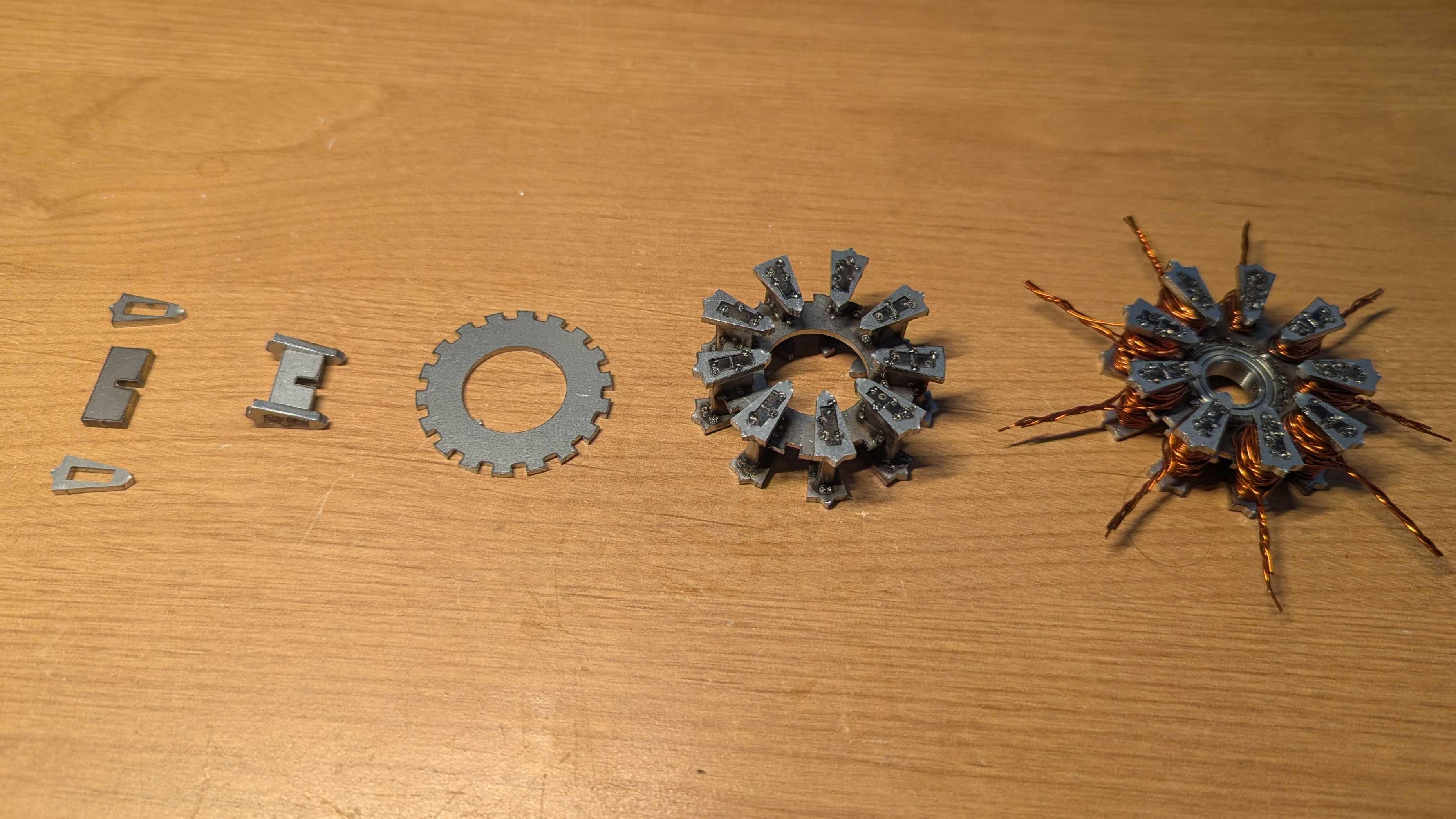
The motor is a dual-rotor axial flux design. Two separate magnet arrays receive flux from both sides of the coil, giving a more complete and direct flux path compared to radial flux motors, where residual reluctance in electrical steel laminations costs efficiency and the saturation penalties for large amperage are higher. The current prototype uses a 12-magnet array with 9 slots for ease of hand-winding; a dual 10-magnet / 12-slot configuration would yield a better winding factor and therefore higher torque and efficiency. The stator iron of the coil slots is micro-TIG assembled. They are fine and precise, but amenable to automated insertion of the self-fixturing interlocking joints and use of adhesives/CNC Micro-TIG and use of automated winding jigs for mass production. Losses from using solid electrical steel with tab-and-slot joinery for each slot's iron instead of laminations are miniscule at low switching speeds (<1% eddy losses with electrical steel at low to moderate speeds), but make the motor's unique stator geometry significantly easier to mass produce.
So far, the stator has been fabricated and wound, the magnet arrays prepared, and the wave reducer produced and tested. Custom optical encoders are also in development for closed-loop position feedback. Rotor assembly and full motor integration are still ahead. At peak, the motor is expected to produce 1 to 2 Nm of torque. Through the 10:1 reduction, that would yield roughly 10 to 15 Nm at the output, sufficient for a lightweight robotic platform. The trade-off is straightforward: accept a slightly slower, but significantly higher-torque motor and gain backdrivability, and higher efficiency vs strainwave drives and provide superior manufacturability via a reduced number of mathematically exotic parts vs typical cycloid reducers and planetary gear reducers.